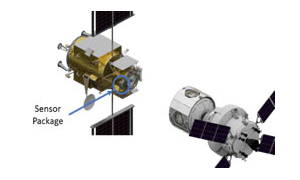




ETS-7、HTV、はやぶさで確立されたランデブ技術を発展させ、更なる安全性・ロバスト性の向上と完全自律化を図ります。
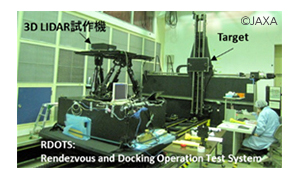
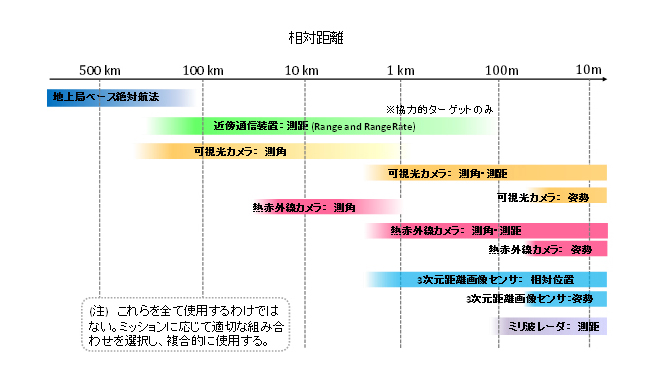
深宇宙というGPSが使えない領域における航法の実現のため、複数原理の相対航法センサで取得した情報と相対/絶対電波航法の情報を適切に併用することで安全でロバストなオンボード航法センサシステムを確立します。 そのために、協力/非協力的対象への近傍ランデブや着陸ミッションにおいてキーとなる3D LIDARおよび画像航法技術については国産開発/研究を行います。
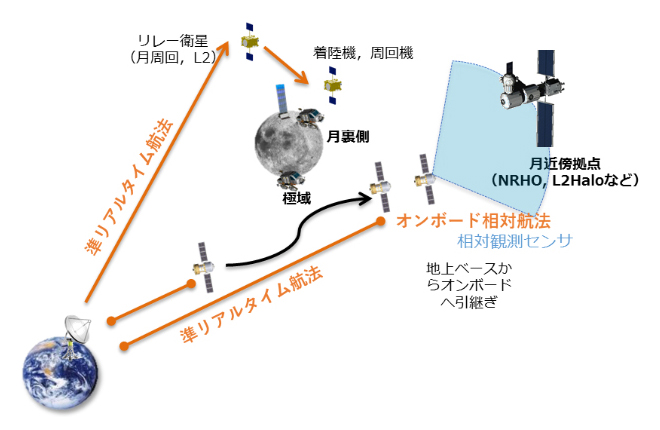
また、オフラインでの絶対/相対軌道推定精度を向上させるとともに、軌道推定の準リアルタイム化と完全オンボード化を目指します。
さらに、月/火星近傍でのランデブ方式の国際標準化に積極的に取り組み、日本の優位性を維持・発展させて産業発展を狙います。