



研究の概要
スペースデブリ問題の解決には、大型スペースデブリを混雑した軌道から除去する必要があり、そのための捕獲技術の実現が望まれています。この技術の研究開発は、スペースデブリ問題への貢献はもとより、将来的には軌道上の宇宙機のメンテナンスやリサイクルといった「軌道上サービス」技術の獲得にもつながります。
捕獲技術は宇宙ステーション補給船「こうのとり」等で開発されたランデブドッキング技術の応用になりますが、スペースデブリは「こうのとり」のように捕獲されやすい設計はされていない「非協力的対象」なので、
- 捕獲するためのドッキングポートを有していない
- デブリ-除去衛星間の誘導制御誤差が大きくなる
といった技術課題があります。
JAXAではこのような技術課題を解決し、大型スペースデブリの捕獲を可能とする技術の研究を行っています。
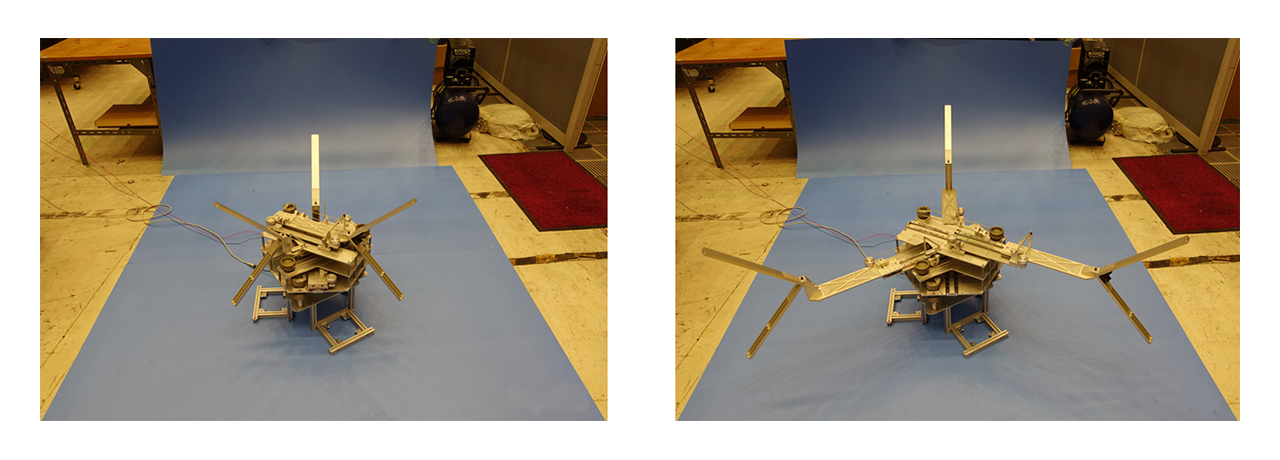
図1はデブリ化したロケット上段を捕獲するためのエンドエフェクタの試験機です。
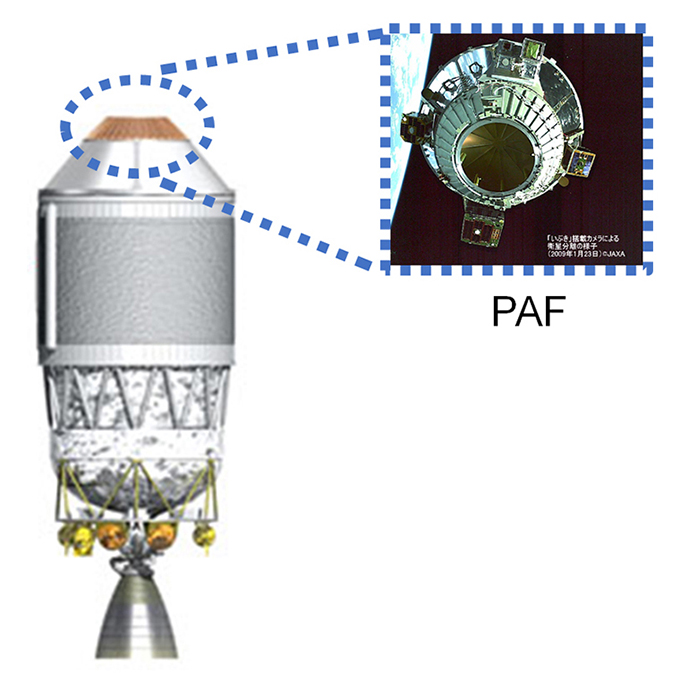
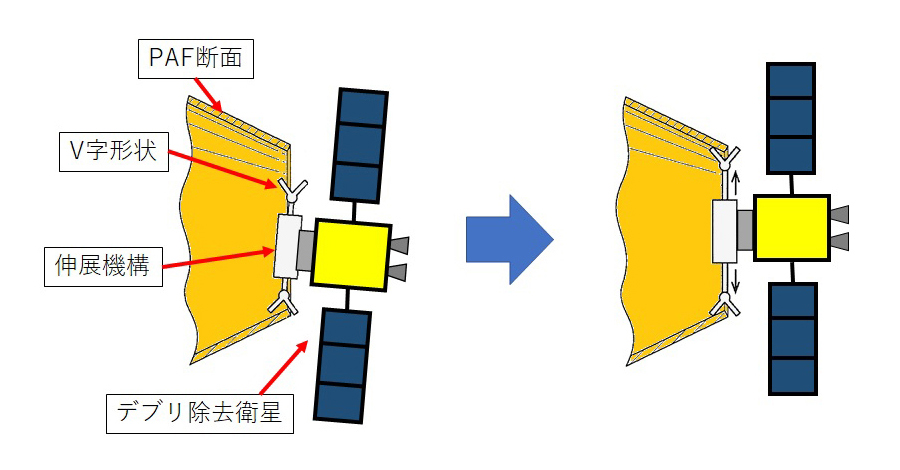
ロケットは共通して図2のような人工衛星を搭載するためのPAF(Payload Adapter Fitting)を有しています。
試験機は図3のようにVの形をした構造がワイヤ駆動による伸展機構の先端に装着されており、PAF内にて伸展機構を伸展駆動させることでPAFの捕獲を実現します。このような技術により、非協力的対象であることの技術課題を解決し、大型スペースデブリの捕獲把持の実現を目指します。 その他にも力覚制御の研究や別方式の捕獲機構の検討も行っています。
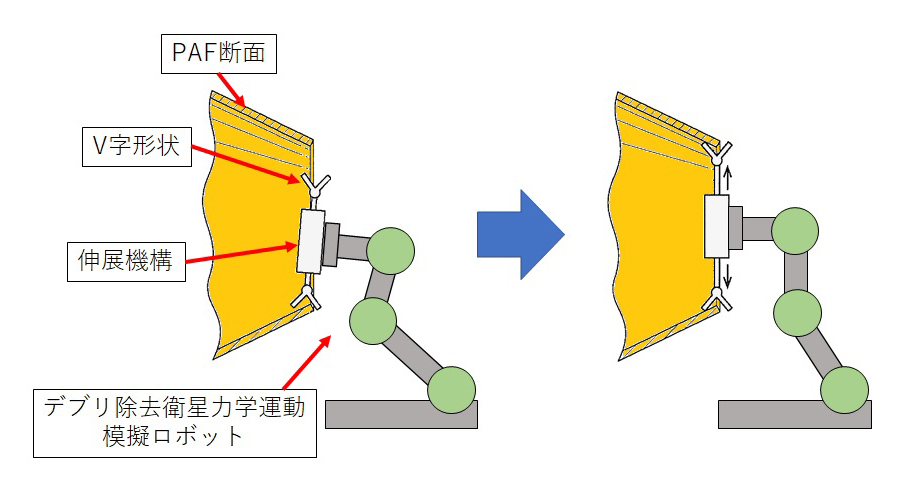
捕獲技術の研究には、エンドエフェクタだけでなく、そのエンドエフェクタが軌道上において実際に捕獲ができるのか、捕獲の際にどのようなことが起こるのか、を検証する試験設備の研究も含まれます。 JAXAでは、ロボットアームを用いることで無重力環境における二つの物体の相対運動を再現するモーションシミュレータ装置(図4)を構築しています。この設備を用いて今後、図1のようなエンドエフェクタを含めた、様々な捕獲方式の研究、試験を行う予定です。
研究実績
発表論文
- Nobutaka Tanishima, Hiroyuki Okamoto, Kentaro Iki, KeisukeWatanabe, Teppei Okumura, Hiroki Kato, Masato Hayashi, and Daichi Hirano. ”Concept and Design of the Caging-Based Debris Gripper for PAF Capturing”, 1st International Orbital Debris Conference, Houston, 2019.
- Nobutaka Tanishima, Daichi Hirano, Tsumaki Toshimichi, Hiroki Kato, " Concept and Mechanism of the Tendon Actuated Versatile Debris Gripper", in Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO), 2017, pp. 2129-2135.
- Daichi Hirano, Hiroki Kato, Tatsuhiko Saito, "Online Path Planning and Compliance Control of Space Robot for Capturing Tumbling Large Object", in Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.
- Hiroki Kato, Daichi Hirano, Jun Ota, "Collision-based Contact Mode Estimation for Dynamic Rigid Body Capture", in Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Brisbane, 2018, pp. 881-888.
- Daichi Hirano, Yu Nakajima, Hiroki Kato, Takahiro Nozaki and Kouhei Ohnishi, “Reaction Force Observer for a Free-Floating Robot”, in Proceedings of International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Madrid, 2018, pp. 881-888.
- K. Shibasaki, W. Oobayashi, et. al.. “Conceptual study of Mechanical and Sensing System for Debris Capturing for PAF”, Proceedings of the 7th Space Debris Workshop, JAXA, pp.271-288, 2016.
- T. Mataki, Y. Akahoshi, T. Koura, Y. Kitazawa, K. Shimamura, T. Izumiyama, K. Hashimoto, S. Kawamoto, J. Aoyama, T. Fukuta, “Evaluation of Harpoon Tips for Debris Capture”, Trans. JSASS Space Tech. Japan Vol. 14 (2016) Issue ists30 Pages Pr_33-Pr_37.
- 多賀啓介, 中西洋喜, 平野大地. "リンク特異点とばね力を用いたデブリ除去デバイス取付機構の研究." ロボティクス・メカトロニクス講演会講演概要集 2019.
特許(公開)
| 件名 | 出願人 | 出願日 | 番号 |
|---|---|---|---|
| デバイス固定装置およびこれを備えるデバイス | JAXA・川崎重工業 | 2013年5月20日 | 特開2014-228025 |
| スペースデブリ捕獲装置及びスペースデブリ除去装置 | IHI・JAXA | 2017年1月20日 | 特開2018-114932 |
| ロボット、把持システム | JAXA | 2017年5月26日 | 特開2018-199183 |
| 接触モード推定装置 | JAXA | 2018年5月18日 | 特願2018-096291 |
| ロボット | JAXA | 2019年9月12日 | 特願2019-166316 |