



飛行制御
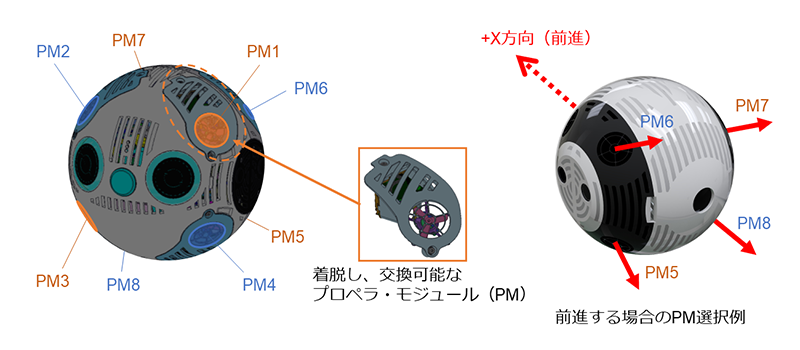
充電ステーションへの自動帰還は、家庭用のロボット掃除機でも一般的となっている技術ですが、国際宇宙ステーション内では、床上の平面的な移動ではなく、宇宙船内無重力空間を、3自由度位置(X、Y、Z)と3自由度回転姿勢(ロール、ピッチ、ヨー)を制御しながら、帰還までの空中経路を生成し、空中経路に沿って誘導する必要があります。また、船内の気流が循環する中でも、カメラを見たい方向に向けながらロボットの姿勢を安定させる必要があります。これらの制御の推進機構(=アクチュエータ)を地上ドローンと同じプロペラ方式のみで実現しました。8基のプロペラを異なる向きに配置し、それらの回転数をうまく制御することで、「きぼう」船内を正確に安定して飛行できるようになりました。
プロペラ・モジュール配置
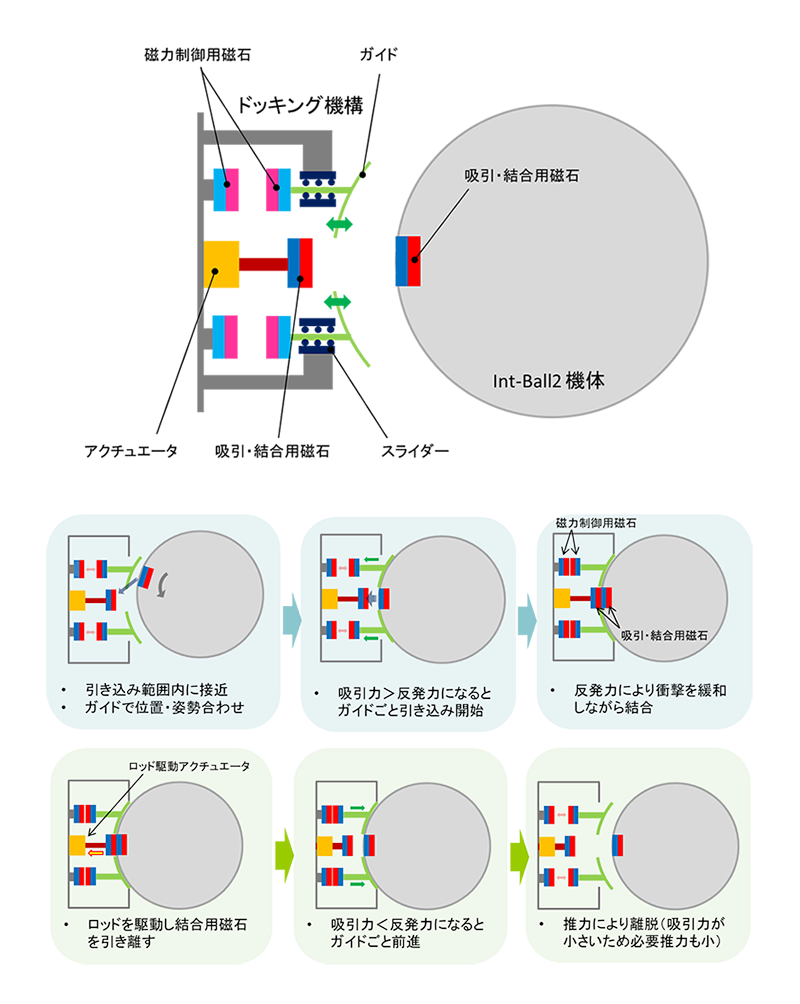
ドッキング機構
ドッキング機構では、Int-Ball2の丸い形状を活かしたガイドを考案することで、ロボットの誘導誤差があっても確実にドッキングし、安全に充電・通信接続することを可能としました。磁石の反発力を利用してガイドが前後方向に動くようにしたことで、位置合わせと緩衝を一つのシンプルな機構で実現しています。「ドッキング時に機体を引き込む」、「ドッキング中に機体を保持する」、「リリース時に機体の離脱を妨げない」、「ガイドによって十分な緩衝作用を得る」というドッキング機構に必要な機能全てを、「きぼう」船内でも省スペースで済むようにコンパクトなサイズに納めることができました[1](特許取得[2])。
ドッキング機構
ドッキング・ステーション
検証技術
初号機と同様に二次元定盤上で空気浮上装置に乗せて、飛行制御とドッキング制御の水平的な動きを確認する試験を実施しました(動画)。また、無重力環境におけるInt-Ball2のようなフリーフライングロボットの航法・誘導・制御の3次元空間での妥当性を地上で検証するハイブリッド・シミュレーション試験技術を新たに開発し適用しました[3]。軌道上船内での航法精度評価には、平面視覚マーカを用いた計測システム※を開発し適用しています。
※カメラとマーカの相対的な位置・姿勢の高精度な計測を実現する画像計測ツール
マーカ技術について(リーグソリューションズ株式会社)
二次元定盤での試験の動画:ドッキング
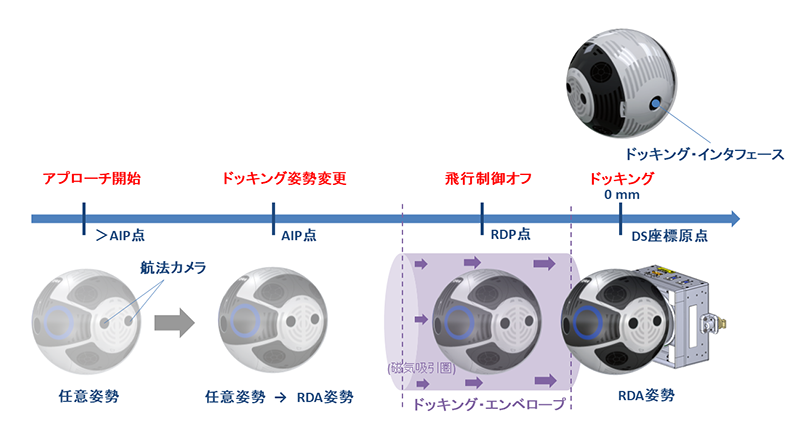
ドッキングモード・シーケンス
関連リンク
参考文献
- K. Watanabe, “Magnetic Docking Mechanism for Free-flying Space Robots with Spherical Surfaces”, in Proc. of 2020 IEEE International Conference on Robotics and Automation (ICRA)
- 特許第7175004号「保持装置及び保持システム」
- D. Hirano, et al., “Hardware-in-the-Loop Simulator with Low-Thrust Actuator for Free-Flying Robot's Omni-directional Control”, in Proc. of 2023 IEEE International Conference on Robotics and Automation (ICRA)